PHINeas
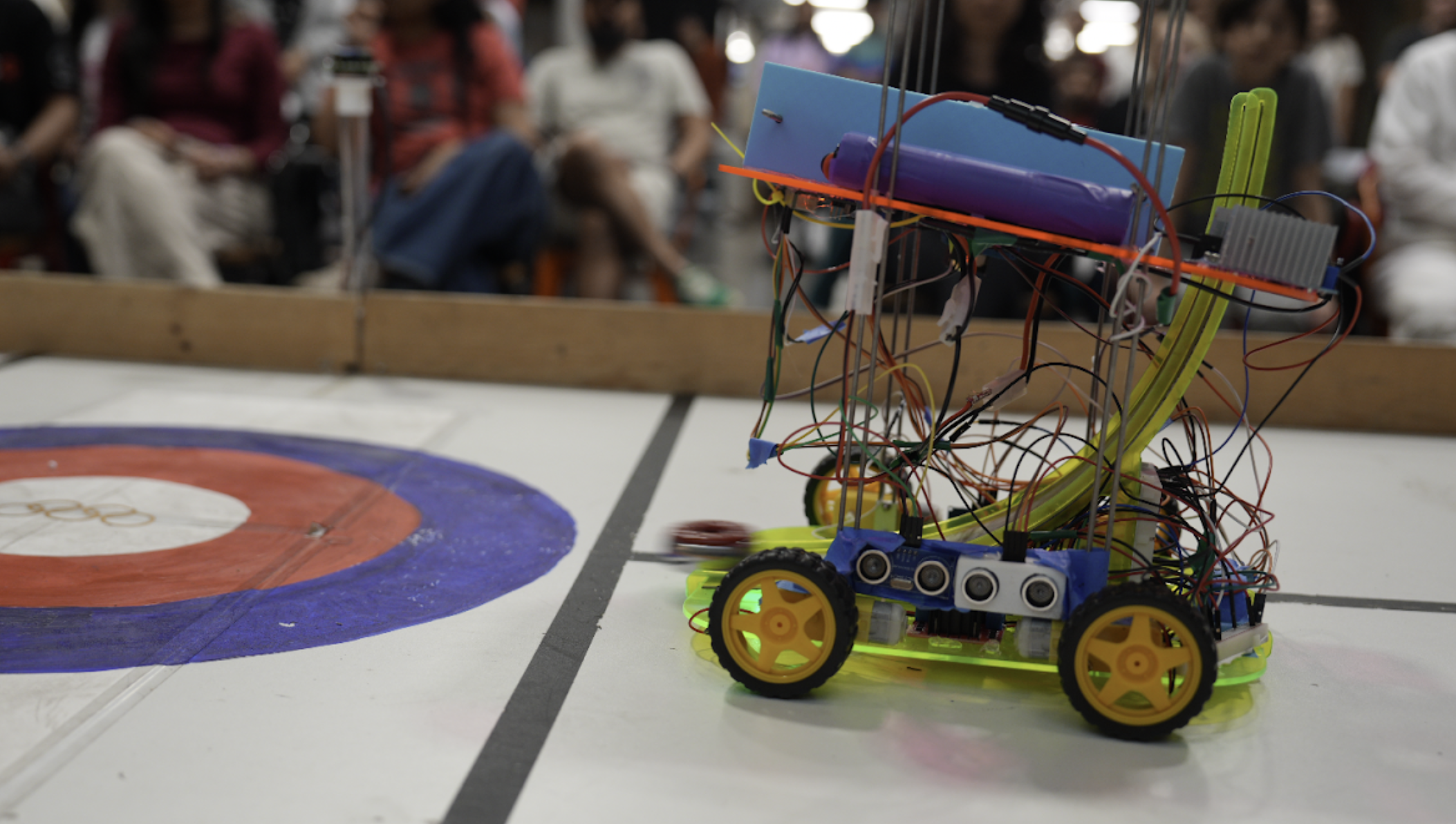
Action shot of our robot during the competition.
For my ME210 class at Stanford, my group and I built an autonomous robot for a head-to-head curling competition. The robot had to navigate a 4ft × 16ft arena on its own, find the target, and place pucks as close to the bull's-eye as possible with no human input after pressing start.
It used ultrasonic sensors and a line sensor for navigation, a conveyor belt ramp to dispense pucks, and two Arduinos to handle sensing and motor control. We built it incrementally over about three weeks, and it ended up winning four matches and making it to the final of the competition.